Referaty plenarne
 |
prof. dr hab. inż. Andrzej Bartoszewicz Prof. dr hab. inż. Andrzej Bartoszewicz pracuje na Wydziale Elektrotechniki, Elektroniki, Informatyki i Automatyki Politechniki Łódzkiej. Jego zainteresowania naukowe obejmują zagadnienia sterowania ślizgowego, zastosowania metod teorii regulacji do zarządzania procesami logistycznymi i sterowania przepływem danych w sieciach teleinformatycznych. Jest autorem ponad 250 prac, w tym 3 monografii i około 40 artykułów opublikowanych w czasopismach z tzw. listy filadelfijskiej. Pełnił rolę zaproszonego redaktora numerów specjalnych czasopism International Journal of Adaptive Control and Signal Processing oraz IEEE Transactions on Industrial Electronics. Był kierownikiem i wykonawcą projektów badawczych KBN, MNiSW, NCN i EPSRC. Jest laureatem programu Mistrz Fundacji na Rzecz Nauki Polskiej. |
| Tytuł | Streszczenie |
| Ślizgowe sterowanie dyskretnymi i ciągłymi obiektami dynamicznymi | Podstawowym celem automatyki jest takie sterowanie urządzeniami, aby zachowywały się one w pożądany przez użytkownika sposób. Ten cel musi zostać osiągnięty pomimo nieprzewidywalnego oddziaływania środowiska na układ sterowania, a często także przy braku pełnej znajomości sterowanego urządzenia i jego obciążenia. Zatem istotną cechą układu sterowania jest jego odporność na zakłócenia zewnętrzne i niedokładności modelu obiektu. Tę właściwość mają układy sterowania o zmiennej strukturze z ruchem ślizgowym. W referacie omówione zostaną podstawowe pojęcia i koncepcje sterowania ślizgowego, wskazane zostaną aktualne kierunki badań w tym zakresie i podane zostaną przykłady zastosowań. Rozważane będą zarówno ciągłe, jak i dyskretne regulatory ślizgowe przeznaczone dla obiektów o jednym i wielu wejściach. Omówione zostaną zagadnienia optymalnego wyboru stacjonarnych i niestacjonarnych powierzchni ślizgowych, eliminacji fazy osiągania ruchu ślizgowego i projektowania regulatorów w oparciu o predefiniowane przebiegi zmiennej przełączającej. |
 |
prof. dr hab. inż. Adam Czornik Jest absolwentem Wydziału Matematyczno-Fizycznego Politechniki Śląskiej. Studia na kierunku Matematyka Stosowana ukończył w 1995 r., po czym rozpoczął pracę w Instytucie Matematyki Politechniki Śląskiej na stanowisku asystenta. Stopień doktora nauk technicznych uzyskał w roku 1997 na wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej. W tym samy roku rozpoczął pracę na stanowisku adiunkta w Instytucie Automatyki. Stopień doktora habilitowanego nauk technicznych w dyscyplinie automatyka i robotyka uzyskał w roku 2004 na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej. W dniu 11 września 2013r. Prezydent Rzeczypospolitej Polskiej nadał mu tytuł profesora. Od roku 2012 jest Dziekanem Wydziału Automatyki, Elektroniki i Informatyki Politechniki Śląskiej. Zainteresowania naukowe prof. Czornika koncentrują się wokół matematycznej teorii sterowania. W swej pracy naukowej zajmował się sterowaniem adaptacyjnym, problem liniowo kwadratowy, równaniami Riccatiego i Lapunowa, układami liniowymi ze zmiennymi parametrami oraz teorią wykładników charakterystycznych. Jest autorem ponad 100 publikacji w czasopismach i materiałach konferencyjnych. |
| Tytuł | Streszczenie |
| Charakterystyki liczbowe dyskretnych układów liniowych | Wiele własności układów dynamicznych może być z powodzeniem scharakteryzowanych przez pewne wielkości liczbowe nazywane charakterystykami liczbowymi lub wykładnikami charakterystycznymi. Należą do nich między innymi: wykładniki Lapunowa, Perrona, Bohla, Izobowa, Grobmana oraz uogólnione promienie spektralne. Liczby te opisują różne typy stabilności, tempo wzrostu lub malenia trajektorii układu czy wrażliwość własności dynamicznych układu na zakłócenia parametryczne. Wykładniki Lapunowa opisują eksponencjalną stabilność, wykładniki Perrona wyznaczają dolne oszacowanie eksponencjalnego wzrostu trajektorii, wykładniki Bohla charakteryzują jednostajną eksponencjalną stabilność, a wykładniki Izobowa i Grobmana opisują możliwe zmiany wykładników Lapunowa pod wpływem różnych typów zakłóceń parametrycznych. Uogólnionych promieni spektralnych używa się do opisu stabilności układów z przełączeniami. W referacie omówione będą wymienione wyżej charakterystyki dla dyskretnych układów liniowych o zmiennych w czasie współczynnikach oraz ich interpretacja w języku własności dynamicznych rozpatrywanego układu. Dyskutowany będzie również problem lokowania tych charakterystyk poprzez odpowiedni dobór sprzężenia zwrotnego. Jest to dalekie uogólnienie znanego z klasycznej teorii problemu lokowania biegunów i jest ściśle powiązane z problemem sterowalności. Dlatego też w trakcie referatu zostaną omówione główne typy sterowalności dyskretnych układów liniowych ze zmiennymi współczynnikami. Wydaje się, że opracowanie efektywnych metod wyznaczania charakterystyk liczbowych oraz metod ich lokowania poprzez odpowiedni dobór sterowania znacznie poszerzy możliwości zastosowań teorii układów o zmiennych współczynnikach w zastosowaniach praktycznych. |
| prof. dr hab. inż. Tadeusz Kaczorek W 1956 roku ukończył studia na Wydziale Elektrycznym Politechniki Warszawskiej, gdzie w 1962 roku obronił pracę doktorską. W 1964 roku otrzymał stopień naukowy doktora habilitowanego. W latach 1965–1970 był kierownikiem Katedry Podstaw Elektroniki i Automatyki, a w latach 1969–1970 dziekanem Wydziału Elektrycznego Politechniki Warszawskiej. W latach 1970–1973 prorektor Politechniki Warszawskiej, w latach 1970–1981 dyrektor Instytutu Sterowania i Elektroniki Przemysłowej Politechniki Warszawskiej. Był również kierownikiem Zakładu Sterowania powyższego Instytutu. W 1971 roku otrzymał tytuł profesora nauk technicznych oraz profesora nadzwyczajnego Politechniki Warszawskiej. W 1974 roku uzyskał tytuł profesora zwyczajnego Politechniki Warszawskiej. W latach 1987–1988 był przewodniczącym Komitetu Automatyki i Robotyki. Od 1986 roku członek korespondent, a od 1998 roku członek rzeczywisty Polskiej Akademii Nauk. W latach 1988–1991 był kierownikiem Stacji Naukowej PAN w Rzymie. Od wielu lat jest członkiem Fundacji Nauki Polskiej. Od czerwca 1999 roku członek zwyczajny Akademii Inżynierskiej. Obecnie zajmuje stanowisko profesora zwyczajnego na Wydziale Elektrycznym Politechniki Białostockiej oraz Politechniki Warszawskiej. Od 1991 roku jest członkiem, a obecnie przewodniczącym Centralnej Komisji ds. Stopni i Tytułów (wiceprzewodniczący w latach 2003–2006). |
| Tytuł | Streszczenie |
| Uogólnienia metody Klamki na układy niecałkowitego rzędu z ograniczonymi sygnałami i na dodatnie obwody elektryczne | Metoda Klamki sterowania układów liniowych z minimalną energią zostanie uogólniona na liniowe układy niecałkowitego rzędu oraz na dodatnie obwody elektryczne. Rozpatrzone zostaną dwa przypadki układów i obwodów o nieograniczonych sygnałach sterujących i o ograniczonych sygnałach sterujących. Rozważania ogólne zostaną zilustrowane przykładami. |
| prof. dr hab. inż. Jacek Kluska Prof. Jacek Kluska jest absolwentem Wydziału Elektroniki Politechniki Wrocławskiej. Od 37 lat pracuje w Politechnice Rzeszowskiej, gdzie pełnił dwukrotnie funkcję prorektora ds. nauki, a wcześniej prodziekana Wydziału Elektrotechniki i Informatyki. Kieruje zespołem badawczym Sztucznej Inteligencji i Podstaw Informatyki. Wypromował 6 doktorów. Jego wcześniejsze zainteresowania dotyczyły teorii automatów, cyfrowych układów sterowania i stabilności układów dynamicznych. Obecnie skupiają się one wokół zastosowań logiki rozmytej i inteligencji obliczeniowej w automatyce i medycynie. Jest autorem lub współautorem ponad 80 artykułów naukowych, 2 monografii i 3 skryptów. Pełni funkcję edytora stowarzyszonego w 2 czasopismach indeksowanych w JCR. Brał udział w 8 projektach badawczych KBN, NCN i NCBiR jako współwykonawca, oraz 3-krotnie jako kierownik. Uczestniczy w pracach kilkunastu komitetów programowych konferencji krajowych i zagranicznych. Jest członkiem Komitetu Automatyki i Robotyki PAN. |
| Tytuł | Streszczenie |
| Wybrane zastosowania analitycznych metod modelowania rozmytego i inteligencji obliczeniowej | Logika rozmyta wykorzystywana do opisu niepewności o charakterze nieprobabilistycznym, odniosła sukces w świecie inżynierów i technologów. Obecnie trudno byłoby znaleźć taką dziedzinę, w której badacze nie próbowaliby stosować rozmytych systemów regułowych. Dotyczy to zwłaszcza automatyki, częściowo robotyki, medycyny, ekonomii, inżynierii środowiska, budownictwa czy inżynierii materiałowej. Pomimo ogromnej liczby publikacji na temat zastosowań teorii zbiorów rozmytych, niewiele jest prac z zakresu analitycznych metod analizy systemów opartych na logice rozmytej. Akceptacja jakiejkolwiek teorii nie powinna wynikać z mody czy trendu, lecz dowodów wynikających np. z podejścia analitycznego. Prostym przykładem jest rozmyty system ekspertowy pracujący w pętli sprzężenia zwrotnego w układzie sterowania, pełniący funkcję regulatora. Dzięki metodom analitycznym można wykazać – a nie tylko przekonać na podstawie symulacji, że regulator rozmyty nie może być gorszy od klasycznego PID. Za pomocą metod analitycznych można sporo osiągnąć; między innymi można pokazać, że realizacja fizyczna układu sterującego może być nie tylko programowa – co jest oczywiste, ale całkowicie sprzętowa. Wprowadza to zupełnie nową jakość i często niewiele kosztuje. W teoretycznej części referatu podane będą podstawowe wyniki z zakresu analitycznych metod modelowania rozmytego (generator, macierz fundamentalna, lematy). Omówione będą niektóre wnioski wynikające z teorii analitycznej, w tym sposób na osłabienie przekleństwa wymiarowości systemów rozmytych i metoda identyfikacji pewnej klasy nieliniowych systemów dynamicznych. W zakresie zastosowań, zaprezentowany będzie system nawigacji robota mobilnego. Pokazana będzie metoda konstrukcji klasyfikatora pełniącego funkcję medycznego systemu wspomagania decyzji, mającego łatwo interpretowalne reguły, otrzymanego w wyniku zastosowania wyników analitycznych metod modelowania rozmytego, programowania ekspresji genów oraz innych metod inteligencji obliczeniowej. Pokazana będzie całkowicie sprzętowa implementacja rozmytego systemu regułowego za pomocą FPGA z wielokrotnie większą liczbą wejść, niż w dotychczas spotykanych systemach rozmytych. Omówimy też rozmytą sieć Petriego, mającą postać bardzo szybkiego układu cyfrowego, służącego do sterowania procesami równoległymi i diagnostyki. |
 |
prof. dr hab. inż. Krzysztof Malinowski W 1971 roku ukończył z wyróżnieniem studia na Wydziale Elektroniki Politechniki Warszawskiej. Po trzyletnich studiach doktoranckich w Instytucie Automatyki Politechniki Warszawskiej w 1974 roku obronił (z wyróżnieniem) rozprawę doktorską. Od 1974 roku do chwili obecnej pracuje w Instytucie Automatyki i Informatyki Stosowanej (IAiIS) Politechniki Warszawskiej. W 1978 otrzymał stopień doktora habilitowanego a w 1989 roku tytuł naukowy profesora nadzwyczajnego nauk technicznych i nominację na stanowisko profesora. W 1994 roku został mianowany na stanowisko profesora zwyczajnego w Politechnice Warszawskiej. W latach 1980-1984 pełnił funkcje zastępcy dyrektora Instytutu ds. Nauczania, a następnie zastępcy dyrektora ds. nauki Instytutu Automatyki PW. W latach 1984-1996 był dyrektorem Instytutu Automatyki i Informatyki Stosowanej PW. Był dziekanem Wydziału Elektroniki i Technik Informacyjnych oraz przewodniczącym Senackiej Komisji ds. Nauki (1996-1999). Od 1999 roku jest dyrektorem Centrum Naukowego Automatyki i Technik Informacyjno-Decyzyjnych Politechniki Warszawskiej (CATID). Jest członkiem korespondentem Polskiej Akademii Nauk (od 1998 roku) i członkiem zwyczajnym Towarzystwa Naukowego Warszawskiego. Jest przewodniczącym Komitetu Automatyki i Robotyki Polskiej Akademii Nauk. Jest także członkiem Technical Committee on Optimization, International Federation of Automatic Control, Rady Naukowej Instytutu Badań Systemowych Polskiej Akademii Nauk oraz Rady Naukowej Przemysłowego Instytutu Automatyki i Pomiarów, a także (od 1982) stałym konsultantem Decision Technologies Group w Department of Computation, University of Manchester Institute of Science and Technology (Wielkia Brytania). Od roku 1998 jest członkiem Rady Informatyki przy Prezesie Rady Ministrów. |
| Tytuł | Streszczenie |
| Remarks on Optimizing versus Regulatory Control of Dynamic Systems: Transmission Operation Optimizer for Toronto Water System. | Rozproszone i hierarchiczne mechanizmy decyzyjne oraz narzędzia do komputerowej analizy symulacyjnej układów sterowania i zarządzania odgrywają ważną rolę w obecnie prowadzonych pracach badawczych dotyczących sterowania ruchem i jakością usług w sieciach komputerowych.. |
 |
dr hab. inż. Marek Pawełczyk, prof. Pol. Śl. Dr hab. inż. Marek Pawełczyk, prof. Politechniki Śląskiej jest Z-cą Dyrektora Instytutu Automatyki Politechniki Śląskiej oraz Kierownikiem Zakładu Pomiarów i Systemów Sterowania. Pełni również funkcję prezesa ogólnoświatowego towarzystwa naukowego International Institute of Acoustics and Vibration. Jest redaktorem zarządzającym czasopisma z listy filadelfijskiej oraz redaktorem czterech innych czasopism międzynarodowych. Jest także członkiem Komitetu Automatyki i Robotyki oraz Komitetu Akustyki PAN, jak również dwóch komitetów IFAC. Jego zainteresowania naukowe skupiają się wokół problemów komputerowych systemów sterowania, sterowania adaptacyjnego i o stałych parametrach, a także przetwarzania sygnałów, głównie akustycznych i drgań. Jest autorem 130 publikacji w czasopismach i materiałach konferencyjnych. |
| Tytuł | Streszczenie |
| Nowoczesne metody nauczania w technicznej uczelni wyższej | Dynamicznie rozwijający się rynek pracy w obszarze wysokich technologii, dążenie do postrzegania nauki przez pryzmat zastosowań, rosnąca w studentach świadomość własnych zainteresowań oraz konieczność konkurowania przez nich na globalnym rynku wymagają zweryfikowania metod kształcenia w Polskich uczelniach technicznych. Konsultacje wśród przedstawicieli kilkudziesięciu istotnych na Śląsku przedsiębiorstw, występującymi zwykle w randze prezesów lub dyrektorów, zwróciły uwagę na aspekty kształcenia studentów uczelni technicznej istotne z punktu widzenia wymagającego rynku pracy, zgodne z podejściem zaobserwowanym w wiodących uczelniach zagranicznych. Nie są nimi oczekiwanie opanowania wszystkich przedmiotów związanych z danym kierunkiem, niezliczonej liczby niuansów w ramach przedmiotów. Kluczowe jest natomiast przekazanie studentom wiedzy w sposób komunikatywny, nauczenie ich kojarzenia faktów, pokazanie związków z przedmiotami układającymi się w spójny program studiów, zaszczepienie umiejętności efektywnej pracy w zespole, przy zachowaniu odwagi i rzetelnej argumentacji w prezentowaniu swoich pomysłów. Zbieżne są również oczekiwania samych studentów. Drogą do osiągnięcia tych efektów jest wdrożenie odpowiedniego programu kształcenia. Próbę taką podjęto w ramach kierunku automatyka i robotyka na Wydziale Automatyki, Elektroniki i Informatyki Politechniki Śląskiej. Zastosowane metody traktowane są jako pilotażowe w Politechnice Śląskiej, a intencją władz Uczelni jest wdrażanie nowoczesnych rozwiązań na pozostałych kierunkach studiów. Punktem wyjścia, mającym zastosowanie już do przedmiotów podstawowych, jest nauczanie interaktywne na wykładach i ćwiczeniach tablicowych, w którym nauczyciel akademicki pełni rolę przewodnika, zaś studenci motywowani są do samodzielnego odkrywania tematyki przedmiotu, formułowania twierdzeń, poszukiwania rozwiązań, wyciągania wniosków. Podejmują oni z czasem zadanie nauczania innych studentów, systematyzując przy tym swoją wiedzę. Zajęcia laboratoryjne odbywają się w formie nauczania zorientowanego problemowo. W tym celu przeformułowano program poszczególnych przedmiotów. Studenci nie realizują na kolejnych zajęciach różnych zadań, często bez związku, w oparciu o inne dane. W zamian, na początku semestru zapoznają się z konkretnym problemem, po czym na kolejnych spotkaniach stosują do jego rozwiązania różne metody, porównują je ze sobą, proponują modyfikacje, formułują wnioski. Zajęcia laboratoryjne przedmiotów o zbliżonej lub uzupełniającej się tematyce są łączone w bloki. Pozwala to dostrzec związki pomiędzy nimi, efektywniej wykorzystać czas na zajęciach. Studenci z trzech różnych specjalności w ramach jednego semestru tworzą interdyscyplinarne grupy. Pod okiem trzech specjalistów – doświadczonych nauczycieli akademickich reprezentujących te specjalności oraz konsultantów z przemysłu lub innych jednostek zewnętrznych realizują złożony projekt, na który w planie studiów przewidziano aż 14 godzin tygodniowo i 15 punktów ECTS. Praca grup projektowych sformalizowana jest według reguł zarządzania projektami i obejmuje między innymi przygotowanie harmonogramu projektu, budżetu, podział ról i odpowiedzialności w grupie, bieżące raportowanie wyników, opracowanie i obronę sprawozdania końcowego. Istotnym elementem pracy grupy są spotkania seminaryjne, na których na bieżąco omawiany jest projekt, a rolą opiekunów jest uczestniczenie w dyskusji, motywowanie i ukierunkowywanie studentów, przekazanie im na przykładzie projektu szerszej wiedzy o podejmowanych zagadnieniach. Uzupełnieniem przedstawionego programu kształcenia jest usystematyzowana i sformalizowana działalność kół naukowych lub program opieki mentorskiej. Podczas referatu zostaną przedstawione te i inne szczegóły nowoczesnego podejścia do kształcenia w uczelni technicznej – założenia, zagraniczne modele edukacyjne, konkretne rozwiązania dostosowane do polskiego systemu prawnego, jak i doświadczenia uzyskane w wyniku wdrożenia programu na kierunku automatyka i robotyka |
 |
dr hab. inż. Marcin Witczak, prof. UZ Marcin Witczak, profesor Uniwersytetu Zielonogórskiego urodził się 19.12.1973. Prowadzi badania naukowe w zakresie diagnostyki technicznej i sterowania tolerującego uszkodzenia. Autor czterech monografii, w tym dwóch opublikowanych w prestiżowym wydawnictwie Springer, z których pierwsza została uhonorowana Nagrodą Premiera RP w 2009 roku. Jest współautorem ponad 130 prac opublikowanych na łamach prestiżowych czasopism oraz w materiałach uznanych konferencji międzynarodowych. Członek zespołu badawczego dwóch projektów realizowanych w ramach programów ramowych Unii Europejskiej oraz 6 projektów MNiSW (2 jako kierownik). Kierownik Studiów Doktoranckich oraz Zakładu Systemów Informatycznych i Obliczeń Inteligentnych na Wydziale Elektrotechniki Informatyki i Telekomunikacji Uniwersytetu Zielonogórskiego. Warto również podkreślić, że prof. Witczak jest Członkiem Komitetu Cybernetyki Technicznej Polskiej Akademii Nauk, oddział w Poznaniu. |
| Tytuł | Streszczenie |
| Wyzwania i rozwiązania w nowoczesnych układach sterowania i diagnostyki uszkodzeń | Systemy sterowania tolerującego uszkodzenia (ang. Fault-Tolerant Control, FTC) są obecnie intensywnie badane, z teoretycznego i praktycznego punktu widzenia. Jest to zauważalne w wielu publikacjach naukowych oraz w liczbie międzynarodowych zespołów zaangażowanych w badania nad tym zagadnieniem. FTC jest postrzegane jako technika integrująca zaawansowane strategie diagnostyki uszkodzeń z nowoczesnymi metodami sterowania, umożliwiająca dalsze funkcjonowanie systemu w warunkach uszkodzeń. Teoria diagnostyki uszkodzeń i sterowania jest dobrze rozwinięta i udokumentowana dla systemów liniowych. Istnieją również rozwiązania zmniejszające zależność pomiędzy jakością funkcjonowania powyższych metod, a niepewnością modelu opisującego sterowany i diagnozowany, która może być spowodowana takimi czynnikami jak: różnice pomiędzy kopiami użytych elementów konstrukcyjnych, niestacjonarność systemu, zewnętrzne zakłócenia, szumy pomiarowe, itd. Oznacza to, że opracowywanie analogicznych rozwiązań dla systemów nieliniowych jest w pełni uzasadnione. Jedną z głównych trudności w obecnym rozwoje FTC jest fakt, że większość prac prezentowanych w literaturze traktuje problemy diagnostyki uszkodzeń i FTC niezależnie. Niestety, idealna diagnostyka uszkodzeń, a w szczególności ich identyfikacja (określenie rozmiaru uszkodzeń) jest niemożliwa do uzyskania. Uzasadnia to konieczność projektowania zintegrowanych układów diagnostyki i FTC uwzględniających tą niepożądaną właściwość, zarówno dla układów liniowych, jak i nieliniowych. Jak wskazuje przegląd licznych prac w zakresie FTC oraz monografii związanych z tą tematyką, problem integracji jest traktowany bardzo pobieżnie, a jego rozwiązanie zastępuje się szeregiem (zazwyczaj restrykcyjnych) założeń, jakie musi spełniać układ diagnostyczny stanowiący jeden z elementów FTC. Biorąc pod uwagę powyższe uwarunkowania, referat koncentruje się na prezentacji nowoczesnych rozwiązań w zakresie diagnostyki uszkodzeń z zastosowaniem technik analitycznych i metod obliczeń inteligentnych. Omawia się również efektywne metody sterowania tolerującego uszkodzenia wraz z procesem integracji układów sterownia i diagnostyki uszkodzeń uwzględniającym niedokładności związane z procedurą diagnostyczną. Referat zostanie zilustrowany licznymi przykładami praktycznymi. |
 |
prof. dr hab. inż. Krzysztof Tchoń Prof. dr hab. inż. Krzysztof Tchoń jest profesorem automatyki i robotyki, i kierownikiem Katedry Cybernetyki i Robotyki na Wydziale Elektroniki Politechniki Wrocławskiej. Jego zainteresowania badawcze obejmują, metody matematyczne robotyki i robotykę społeczną. W latach 2008-2012 kierował polskim zespołem wykonawców projektu LIREC. Pełni funkcję przewodniczącego Sekcji Robotyki Komitetu Automatyki i Robotyki PAN. dr inż. Jan Kędzierski Dr inż. Jan Kędzierski jest głównym konstruktorem robota FLASH i autorem pierwszej w Polsce rozprawy doktorskiej z dziedziny robotyki społecznej. mgr inż. Michał Dziergwa Mgr inż. Michał Dziergwa jest doktorantem pracującym w obszarze robotyki społecznej. mgr inż. Paweł Kaczmarek Mgr inż. Paweł Kaczmarek jest doktorantem pracującym w obszarze robotyki społecznej. |
| Tytuł | Streszczenie |
| Roboty społeczne |
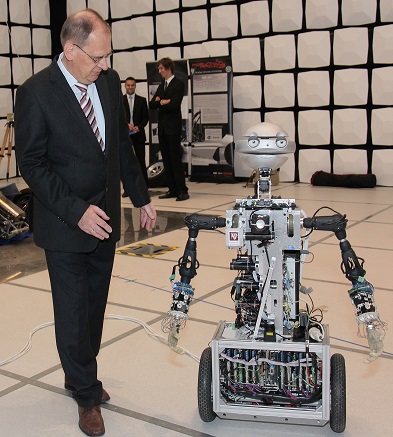
 Widoczną tendencją rozwoju robotyki jest przybliżanie się robotów do ludzi, zmniejszanie się dystansu między człowiekiem a robotem, nie tylko fizycznego, lecz także społecznego. Od całkowitej separacji od ludzi robotów przemysłowych i eksploracyjnych, poprzez roboty usługowe, medyczne i asystujące, które z natury wchodzą w fizyczny kontakt z człowiekiem, wchodzimy w erę robotów społecznych zdolnych do interakcji, komunikacji i kohabitacji z ludźmi. Robota nazywamy społecznym, jeżeli potrafi działać w sposób autonomiczny i komunikować się z człowiekiem za pomocą sygnałów społecznych: werbalnych i niewerbalnych, takich jak wyraz twarzy, gest, spojrzenie, intonacja głosu, etc. Robot społeczny zdolny do asystowania człowiekowi przez dłuższy okres czasu nazywa się robotem towarzyszącym. Skonstruowanie robota towarzyszącego należy do wyzwań współczesnej robotyki. Podstawowe zadania związane z budową robotów towarzyszących polegają na zapewnieniu wiarygodności, interaktywności i użyteczności robota dla człowieka. Przedmiotem referatu są problemy konstrukcji i sterowania robota towarzyszącego. Punktem odniesienia będzie robot FLASH (Flexible Lirec Autonomous Social Helper) skonstruowany w Zakładzie Podstaw Cybernetyki i Robotyki Instytutu Informatyki, Automatyki i Robotyki Politechniki Wrocławskiej, w ramach projektu unijnego LIREC (LIving with Robots and intEractive Companions). FLASH jest balansującym robotem kołowym, wyposażonym w ramiona i ręce przeznaczone do gestykulacji, i głowę zdolną do wyrażania emocji. Umiejętności robota obejmują przemieszczanie się i balansowanie, percepcję otoczenia, komunikację werbalną i niewerbalną, wyrażanie emocji, a także uczenie się. Referat zostanie zilustrowany filmami wideo pokazującymi przykłady interakcji robota FLASH z ludźmi i zakończony prezentacją robota.
Widoczną tendencją rozwoju robotyki jest przybliżanie się robotów do ludzi, zmniejszanie się dystansu między człowiekiem a robotem, nie tylko fizycznego, lecz także społecznego. Od całkowitej separacji od ludzi robotów przemysłowych i eksploracyjnych, poprzez roboty usługowe, medyczne i asystujące, które z natury wchodzą w fizyczny kontakt z człowiekiem, wchodzimy w erę robotów społecznych zdolnych do interakcji, komunikacji i kohabitacji z ludźmi. Robota nazywamy społecznym, jeżeli potrafi działać w sposób autonomiczny i komunikować się z człowiekiem za pomocą sygnałów społecznych: werbalnych i niewerbalnych, takich jak wyraz twarzy, gest, spojrzenie, intonacja głosu, etc. Robot społeczny zdolny do asystowania człowiekowi przez dłuższy okres czasu nazywa się robotem towarzyszącym. Skonstruowanie robota towarzyszącego należy do wyzwań współczesnej robotyki. Podstawowe zadania związane z budową robotów towarzyszących polegają na zapewnieniu wiarygodności, interaktywności i użyteczności robota dla człowieka. Przedmiotem referatu są problemy konstrukcji i sterowania robota towarzyszącego. Punktem odniesienia będzie robot FLASH (Flexible Lirec Autonomous Social Helper) skonstruowany w Zakładzie Podstaw Cybernetyki i Robotyki Instytutu Informatyki, Automatyki i Robotyki Politechniki Wrocławskiej, w ramach projektu unijnego LIREC (LIving with Robots and intEractive Companions). FLASH jest balansującym robotem kołowym, wyposażonym w ramiona i ręce przeznaczone do gestykulacji, i głowę zdolną do wyrażania emocji. Umiejętności robota obejmują przemieszczanie się i balansowanie, percepcję otoczenia, komunikację werbalną i niewerbalną, wyrażanie emocji, a także uczenie się. Referat zostanie zilustrowany filmami wideo pokazującymi przykłady interakcji robota FLASH z ludźmi i zakończony prezentacją robota. |